车载激光点云在城市行道树普查几何属性提取中的应用
刘野 1, 2 梁文标 1, 2
(1.常州市测绘研究院,江苏常州 213000;2.常州市地理信息智能技术中心,江苏常州 213000)
[摘要]行道树是城市景观系统的重要组成部分,具有丰富的生态、环境和审美价值。传统的行道树普查采用人工实地调查的方式进行,效率低下。本文介绍了车载激光点云在城市行道树普查几何属性提取中的应用。通过车载激光点云去噪、地面点滤波、点云归一化、单树分割和几何属性信息提取,获得街道树几何信息。 。实验表明,利用车载激光点云提取行道树几何信息,提取单棵树胸径的精度达到厘米级,横坐标、纵坐标、树高、树高等几何信息的精度达到了厘米级。冠幅宽度达到分米级,覆盖面积精度达到米级,足够用了。这说明了该方法的有效性,大大提高了行道树普查的效率。
[关键词] 行道树普查;车载激光点云;几何信息提取;点云分割
0 简介
行道树是城市景观系统的重要组成部分,具有丰富的生态、环境和审美价值,对于保护和改善城市人居环境具有重要意义[1-2]。在城市园林绿化建设和管理工作中,规划必须立足于现有绿地建设的现状,这就需要对城市行道树进行全面调查,形成一套行道树空间基地。
传统的行道树普查是通过人工实地调查的方式进行的。有关部门根据地形图现状组织大量人力对道路进行一一走访,利用测量设备一一测量行道树的位置、胸径等几何属性[3]。这种方法效率低,需要大量的人工,不太适用。
车载激光点云扫描技术是一种新型测绘技术,可以快速获取道路沿线地表及周边地物的三维空间信息。非常适合城市行道树普查工作。目前车载激光点云行道树普查研究主要集中在行道树自动分类方面,而行道树三维信息提取研究较少。张楠楠等. [4]综合利用点云反射强度、曲率等特征,通过体素分析识别行道树;杨莎莎等人。 [5]将三维点云投影到二维平面上,并根据投影面积、密度等信息,进行街道树木识别;吴斌等. [6]建立规则网格,基于高程分层点云,通过逐层计算网格点密度提取行道树;李海廷等.文献[7]构建了一个由17个特征组成的点云扩展特征向量,采用支持向量机模型来识别行道树。
上述学者的研究主要集中在行道树的识别上,并没有进一步深入到行道树几何属性的后续提取。为了解决传统行道树普查效率低的问题,研究利用车载激光点云提取城市行道树几何属性的应用方法。通过对归一化后的车载激光点云进行单树点云分割kaiyun.ccm,提取行道树点云并自动计算。利用行道树的几何位置、胸径、树高、树冠宽度、覆盖面积等几何属性开yun体育app官网网页登录入口,可以高效地实现行道树普查提取。
1 车载激光点云预处理 1.1 点云去噪
在车载激光点云扫描中,由于空气湿度、温度、多次反射回波等因素的影响,激光点云中会出现噪声,在空气中表现为离散点,覆盖整个测量区域。噪声会对后续行道树分割产生很大影响,必须进行过滤[8-9]。
使用统计过滤进行点云去噪[10-11]。具体算法如下。
1)对于点云集合中的每个目标点,找到距离该点最近的k个邻居点,并计算目标点与邻居点之间的三维距离集合{d1,d2,...,dk}。
2)计算目标点与邻近点的三维距离的平均值daver和标准差σ。
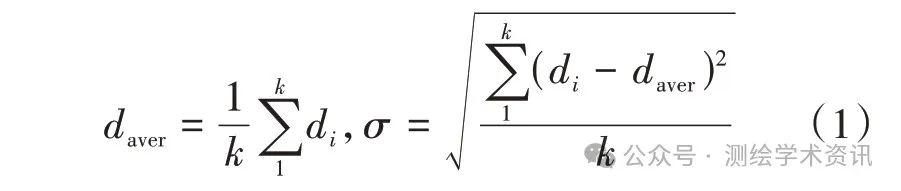
式中,k为相邻点的个数; di 是目标点与邻近点之间的三维距离。
3)目标点与邻居点之间的距离分布近似为高斯分布,因此通过设置高斯分布方差阈值n来进行去噪。如果邻居点i与目标点的三维距离di大于nσ,则认为该邻居点为离群点,即噪声,直接滤除,否则保留。
1.2 接地点分类
考虑到地形起伏对后续个体行道树点云分割的影响,需要对点云进行分类并提取地面点数据。
地面点分类是使用布过滤进行的[12-14]。基本思想是对获取的LiDAR(光探测和测距,LiDAR)点云数据进行高程反演。由于重力作用,布料将与倒转的点云分离。表面下落,然后通过分析布料与相应激光雷达点云之间的相互作用,确定其因重力下落后停留的位置,从而确定布料的最终形状并实现点云过滤。主要步骤如下:
1)设置布料粒度,即网格分辨率Res、迭代次数阈值N、高差阈值H。
2) 将点云集S进行高程方向反演,得到反演后的点云集St。
3)布点初始化。根据网格分辨率Res生成布料点云集合Sc。布料点云集的覆盖范围应与原始点云集一致。布料点云集的高程值应大于倒置点云集的最大高程。
4) 根据平面位置映射,建立布料点云集Sc和反演点云集St的对应关系,并计算反演点云集对应的布料点的高程Hi。
5)模拟布料点云在重力作用下的下落过程,直至布料覆盖倒立的点云。如果布料点云集合的点高程Zi等于反演点云高程Hi,则将该点设置为不可移动点,否则设置为可移动点。
6) 反演点云集合St中的建筑物等物体具有凹值。如果没有限制的话,布点还会继续下降。这些点是步骤5)中的可移动点,会导致滤波结果失真。本题利用布料内力模拟来解决。
对于可移动的分发点,判断其最近邻点是否不可移动。如果是不可移动点,则计算该点与最近邻点的高差为
式中,ΔH为不动点与最近邻点的高程差; Hi为反演点云的高程,Zi为布料点云的点高程。
将布料点向相邻不可移动点的方向移动。初始移动高度值为ΔH,后续每次移动的距离为前一次的1/2。
如果最近的点是可移动的点,则布点将继续下落。
7) 迭代地进行步骤5)和6)。当所有点的移动距离小于高度差阈值H或达到迭代次数N时,算法终止。
8) 对布料点进行步骤2)中的逆变换的逆变换,输出地面布料点集Sg。
9) 接地点分离。对于原始点云集中的每个点,如果与对应的地布点集Sg的高程差小于高差阈值H,则该点被归类为地面点云,否则被归类为非地面点云观点。
2 单树分割 2.1 点云归一化
根据地面点分类结果,可以对激光点云进行归一化处理,以消除地形起伏对后续结果的影响。主要步骤如下。
1)对于原始点云集中任意点Pi(Xi,Yi,Zi),找到地面点集中最接近Pi平面的点Pgi(Xgi,Ygi,Zgi)。
2)标准化。对于点 Pi (Xi, Yi, Zi),归一化点高程为
式中,Z'i为归一化点高程; Zi为原始点云高程,Zgi为地面点集高程。
2.2 单木分割
不同树的重叠部分会导致单树分割结果不准确,这是单树分割中的一个难题[15-17]。考虑到多棵树重叠区域的点云法线和曲率不连续性,更容易检测树干部分[18-20]。引入基于树干部分的区域生长方法,实现单树点云分割,从树干底部开始,向上进行区域分割。生长和个体树分割。具体分割步骤如下:
1)对于归一化后的点云,设置一个高程值,去除小于该高程的点云数据,得到点云数据集Sr。此时点云中的地面点被去除。
2)选择一定的高程范围,对Sr点云数据集中该范围内的点进行圆柱拟合,进行树干检测,得到树干点集Sf。
3) 以树干点集Sf为种子点,得到其k邻域的数据点集SL。
4) 对数据点集SL进行曲面拟合,求解曲面方程参数,根据曲面方程计算点集曲率CL。
5) 对数据点集SL进行空间平面拟合,求解平方方程参数,根据平面方程计算点集法向量VL。
6) 确定种子点及其相邻点的法向量和曲率变化。如果法向量和曲率变化小于相应的阈值,则认为相邻点属于同一类型的种子点,并将分类点从原始点云中移除。 ;
7) 重复步骤3)至6),直至不再出现新的种子点云开·全站体育app登录,单树分割完成。
8)通过人机交互消除少量错误分割点。
2.3 单木材几何信息提取
单树分割完成后,得到单树的激光点云数据。通过激光点云数据处理,可以自动提取行道树的几何位置、胸径、树高、冠幅、覆盖面积等几何信息。具体方法如下。
1)假设单树点云数据集Sf的最高点高程为Zmax,最高点对应的地面点高程为Zg,则行道树高度H为
式中,Zmax为单棵树点云的最高点高程; Zg为最高点对应的地面点高程。
2)设置树干高程阈值范围为{Zd,Zu},从单树点云数据集Sf中提取该高程范围内的点云作为树干点云。求树干点云东、西、南、西、北四个方向的最远端点PE、PW、PN、PS。则行道树的几何位置(X,Y)和胸径DBH为:
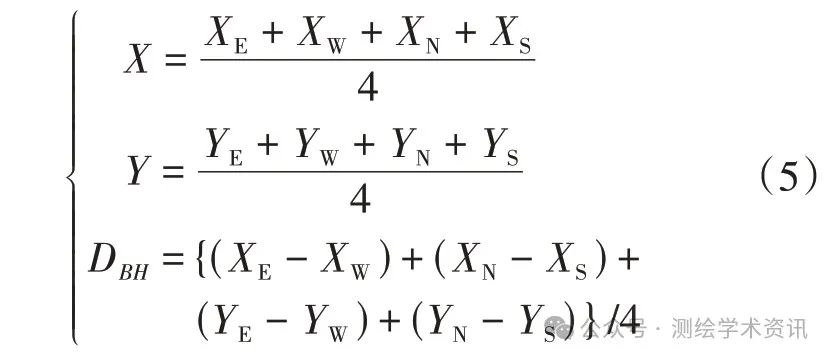
式中,XE、YE、XW、YW、XN、YN、XS、YS分别为东、西、北、南四个方向上树干点云最远端点的横坐标和纵坐标。
将单树点云数据集Sf投影到水平面上,找到投影点云在东、西、北、南四个方向的最远端点Pe、Pw、Pn、Ps。则行道树树冠宽度D和覆盖面积A为
式中,Xe,Ye,
3 实验及结果分析
为了验证本文方法的有效性,选取常州市某道路车载激光点云数据进行实验。数据采用Leica Pegasus移动扫描系统采集,点云密度为100点/m2。实验区地形较为平坦,实验数据长100 m,宽20 m。实验数据如图1所示。

图1 实验数据
从图1可以看出,原始车载激光点云数据包含较为明显的噪声点,这些噪声点分布在整个实验区域,并呈椒盐状。
3.1 点云去噪实验与分析
采用统计滤波方法滤除噪声点。邻居点的数量设置为20,高斯分布方差阈值设置为1.5。点云去噪的实验结果如图2所示。从图中可以看出,本文采用的滤波方法有效地去除了原始点云中的噪声。
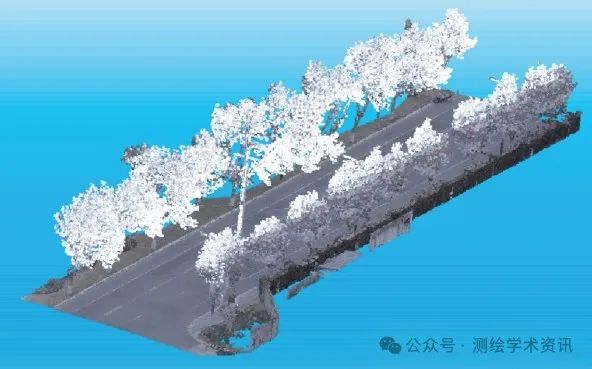
图2 点云去噪效果
3.2 地面点分类实验与分析
对去噪激光点云进行布料过滤。布料分辨率设置为0.5 m,最大迭代次数设置为500,高差阈值设置为0.2 m。过滤后的地面点数据如图3所示。可以看出,布料过滤可以更好地分离点云中的地面点。

图3 地面点滤波实验结果
3.3 点云归一化
基于地面点分类结果,进行点云归一化实验。实验结果如图4所示。点云归一化消除了地面高度波动的影响,使得所有行道树底部高程基本相等,为后续的单树分割提供了良好的数据支持。
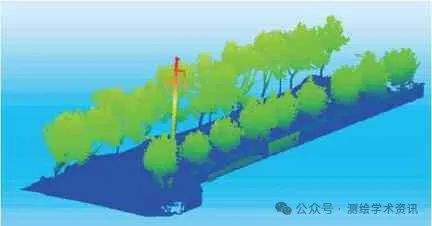
图4 点云归一化实验结果
3.4 单木分割实验与分析
本文的方法用于将归一化点云分割成单棵树。聚类点阈值设置为50,高程阈值设置为0.3 m。单树分割后的点云如图5所示,图中颜色代表单棵行道树的分割结果。可以看出,本文提出的单树分割方法基本正确地对实验区域内的所有行道树进行了分类,但分类结果中仍存在一些点云漏分类或错误分类的情况。
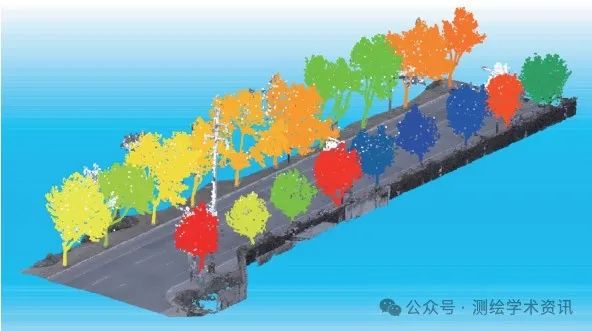
图5 单木分割实验结果
行道树中个体树木分割完成后,根据本文介绍的方法提取行道树的几何信息。为了评价几何信息提取的准确性,将几何信息提取结果的准确性与现场实测数据进行比较,如表1所示。
表1 行道树几何信息提取精度
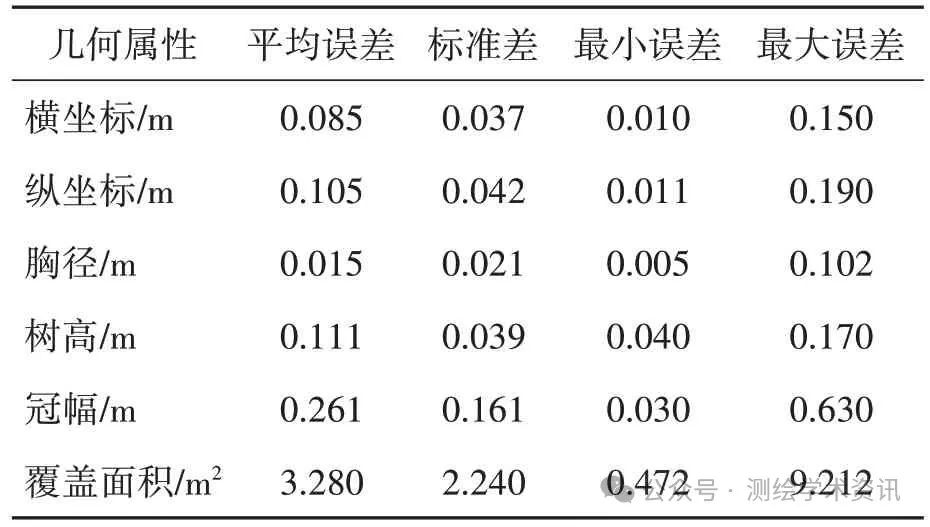
从表中可以看出,本文介绍的行道树几何信息提取方法具有较高的准确率。单树胸径提取精度达到厘米级;横坐标、纵坐标、树高、冠幅等几何信息精度达到分米级;覆盖区域精度较低,精度为米级。
本文介绍的行道树普查方法可以满足园林绿化行业的需求,大大提高行道树普查效率。
4 结论
本文介绍了车载激光点云在城市行道树普查几何属性提取中的应用。通过现场采集几何信息对本文方法进行了验证,证实了该方法的有效性。通过车载激光点云去噪、地面点滤波、点云归一化、单树分割和几何属性信息提取,获得街道树几何信息。该方法准确满足了园林绿化行业的需求,大大提高了行道树普查效率。
本文方法在提取覆盖区域方面精度较低,后续将进一步研究这方面。
引用格式:刘野,梁文标。车载激光点云在城市行道树普查几何属性提取中的应用[J].北京测绘, 2024, 38(11): 1599-1603.
[作者简介]刘野(1983-),男,吉林玉树人,本科生,工程师,从事智慧城市与空间信息研究与开发。邮箱:754741217@qq.com
[通讯作者] 梁文标,工程师 E-mail: 1084097274@qq.com