本文主要内容包括测量管理制度(只讲一点工程测量的重要性,每个施工单位的测量管理制度不同)、施工测量放样准备(简单介绍)、测量误差基础知识(只介绍了部分知识点,详细了解可以参考相关测量书籍)、高程控制测量(四年级高程和三角高程测量相关知识点及实践步骤介绍)、平面控制测量(主要介绍一级线平面控制相关知识测量、实地测量和内部计算)、房屋建造过程测量(请参考之前的文章)、水平仪的检查和校准、一些测量案例分析。

1. 测量管理系统
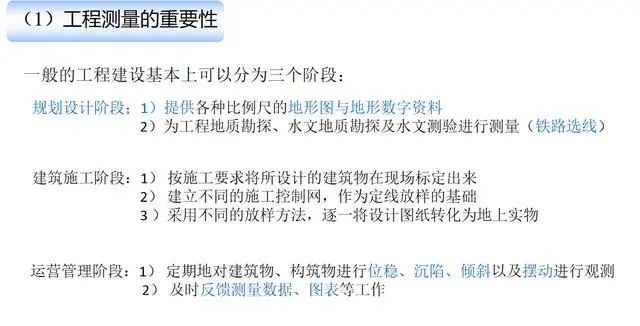
工程测量贯穿于项目的勘察、设计、施工和运营管理阶段。在以往的项目中,因工程测量引发的事故接连发生,对公司形象和经济效益造成了巨大影响。
2、施工测量放样准备
3.测量误差的基本知识


4. 高度控制测量
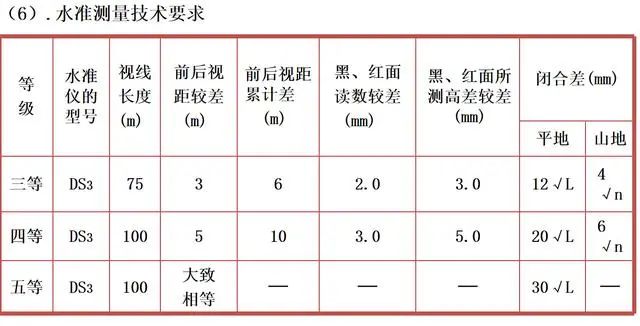
一、一般规定
我国国家水准测量根据精度不同分为一、二、三、四级。一级、二级水准测量称为“精密水准测量”,是国家高程控制的综合依据,可为研究地壳形变提供数据。三、四级水准测量直接为地形测绘和各类工程建设提供必要的高程控制。
高程控制测量是指采用一定的方法和操作程序,完成测量区域内一级高程点的致密化,以满足小范围内测绘和施工的需要。一般来说,可分为三级、四级水准测量和三角高程测量两种形式。
2、四级水准测量
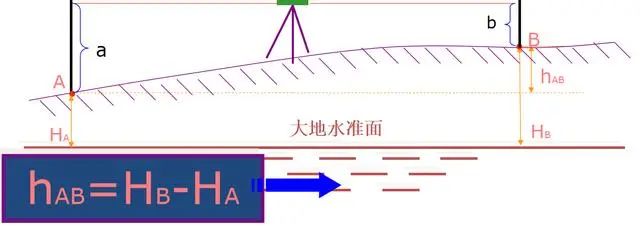
(1).液位测量原理
水准仪是利用水平仪的水平视线和水平尺测量地面上两点的高度差,从而由已知点的高度计算出未知点的高度。
(2)。液位测量网格形式:
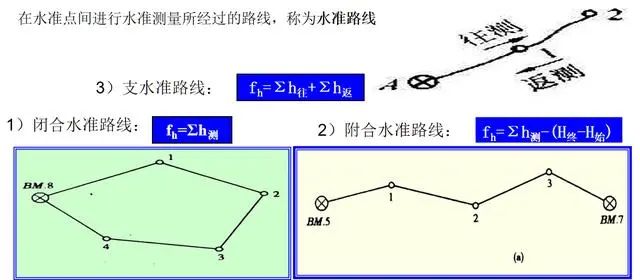
在水准点之间进行水准测量的路线称为水准路线。
(3)。高程系统
我国国家高程系统:黄海高程系统
1956年黄海高程系统(水平原点H=72.289米)、1985年国家高程基准(水平原点H=72.260米)
我国以青岛附近黄海平均海平面为大地水准面;它是人为确定的,相对稳定(1956年,我国以前6年的平均潮位作为大地水准面;1985年,我们以1953年至1979年共26年观测到的平均潮位作为大地水准面。大地水准面)
该水准仪起源于青岛市,作为我国国家海拔基准。 1956年高程基准高程为72.289米,1985年高程基准高程为72.260米。
当地高程系统: 上海:吴淞高程系统
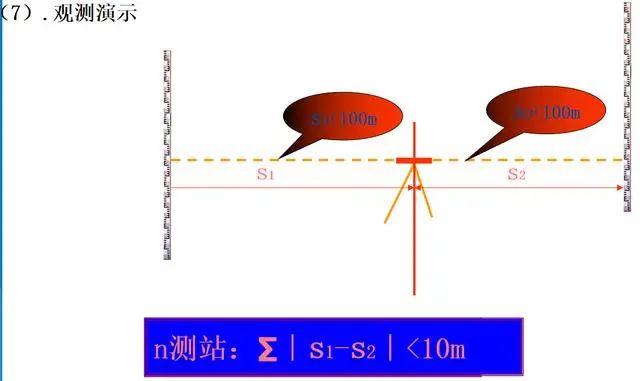
(4)。调平的一般原则
(1)选择有利的观察时间; (2)仪器的前后观看距离近似相等;
(3)相邻测量站的观测顺序为“后、前、前”或“后、前、前”;
(4)按规定采用往返测量或单向双转点法观测;
(5)观察时,间歇点最好在固定点,否则应选择两个固定点。
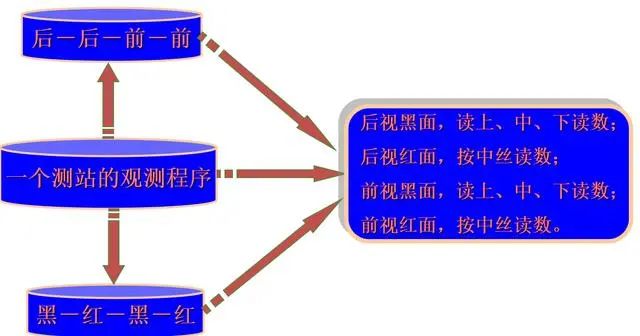
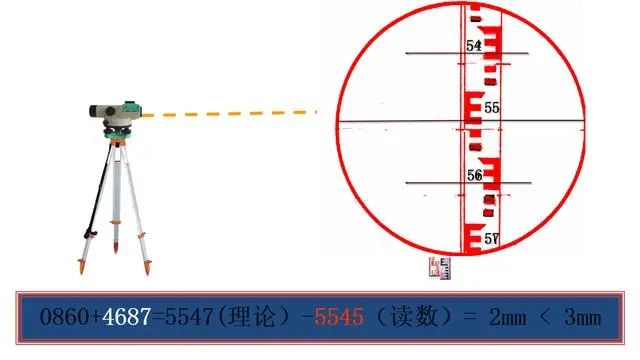
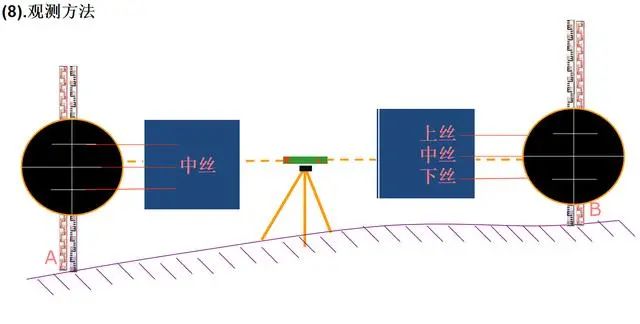
(5)。第四级观察序列
“后-后-前-前”
架好仪器,准确调平,对准后尺,读取黑面上的线读数、底线读数和中线读数;
瞄准后,读取红面中丝读数;
旋转望远镜,瞄准前尺,读取黑面中线读数、上线读数、下线读数;
瞄准前尺并读取红面中间线。
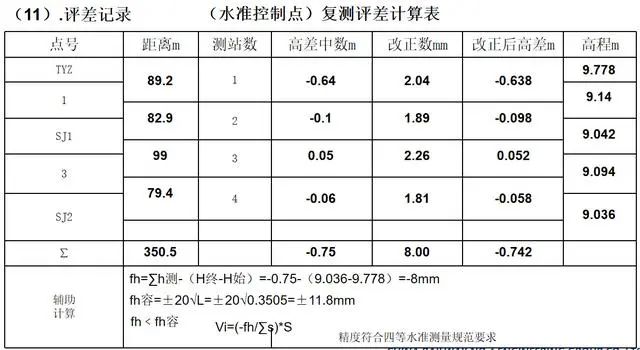
(9).校平结果内部计算方法
(1)计算高差收差fh
定义:观测到的总高差与其理论总高差之间的差值。
公式:fh= Σh测量值− Σh原因
对于等级路由:
Σh理=HB-HA, fh= Σhmeasure− (HB-HA)
对于封闭级别路线:
Σh 理论=0, fh= Σh 测量
对于水平路线:fh= Σh to + Σh return
(2) 计算观测高度差的修正数vi
高差闭合差fh的分配原则为:将高差闭合差fh的符号反转后,按与路线长度或测量站数的比例分配给各个观测高差,即获得每个观测到的高度差的校正数vi。
观测高差修正数vi的计算公式为:
vi=(-fh/Σn) ∙ni
或: vi=(-fh/ΣL) ∙ Li
令:v station = -fh/Σn,调用各测量站的修正数,因此vi = v station ∙ ni;
又设:vkm=-fh/ΣL,称为每公里(单位长度)修正数。因此,vi=vkm∙Li。

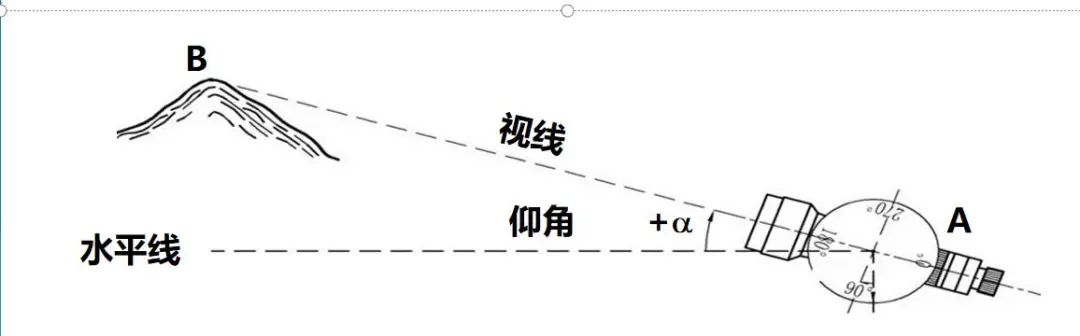
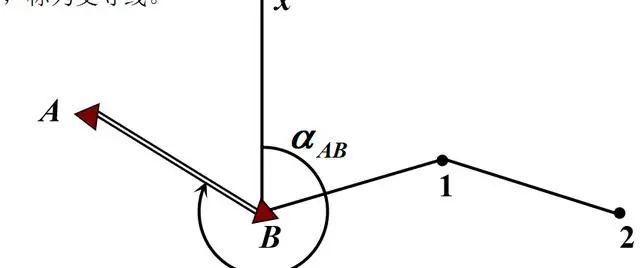
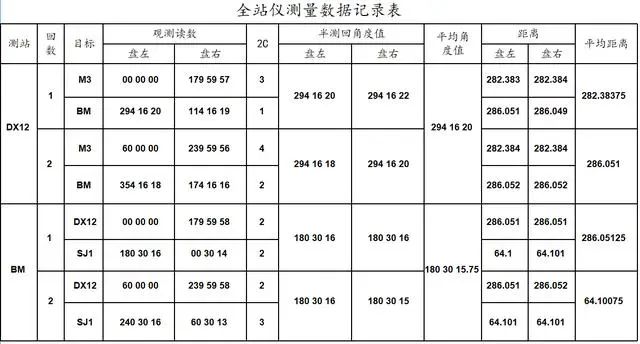
垂直角:从垂直角的概念可知,它是垂直面内的水平线与目标方向的夹角。因此,在测量垂直角度时,可以通过垂直板上两个方向的读数之差来获得角度值,两个方向之一为水平方向。当经纬仪视线水平时,无论朝左还是朝右,其垂直盘读数都是固定值。因此,在测量垂直角时,实际上可以通过瞄准目标并读取垂直板读数来计算垂直角。
垂直指示器差:指示器偏离正确位置一个很小的角度差X,称为垂直指示器差。指示器差值X= (L+R - 360°)/2。由于折射率差的存在,会影响顶角αL和αR的计算,因此折射率差X不应超过±25''。如果指数差异
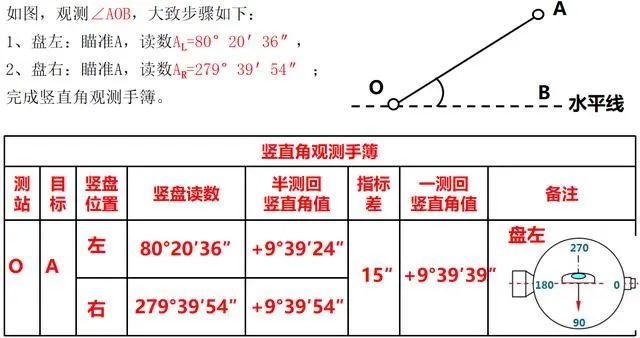
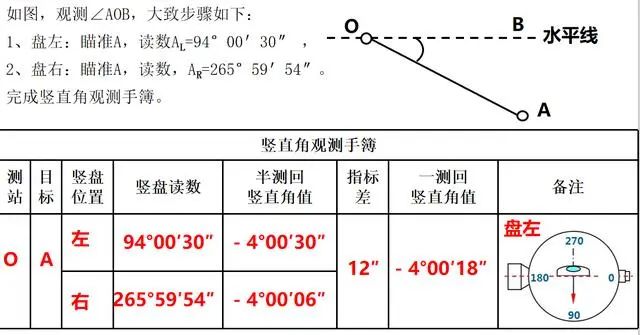
垂直角度观察:
(1) 面 1 观察:将面 1 对准目标点 B,观察并读取垂直面读数 L。利用面左垂直角计算公式:L=90° - L 计算垂直角数。
(2) 正向观察:正向瞄准目标点B,观察并读取垂直板读数R。利用正向角计算公式:R=R - 270° 计算垂直角数。
(3)平均值:取上下半测量角度值的平均值作为一个测量周期的垂直角度值,α=(αL+αR)/2。
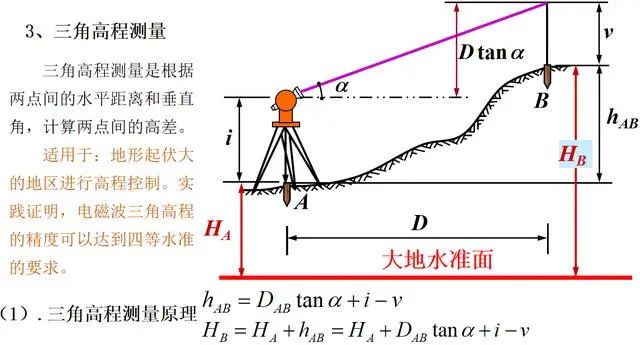
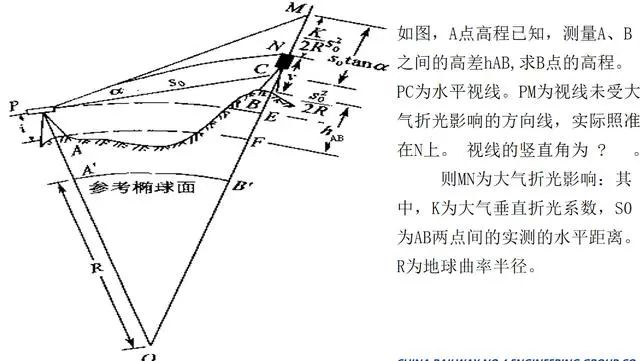
(2).三角高度测量的基本公式
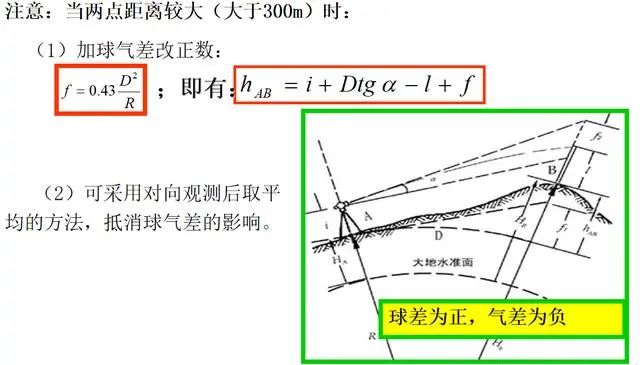
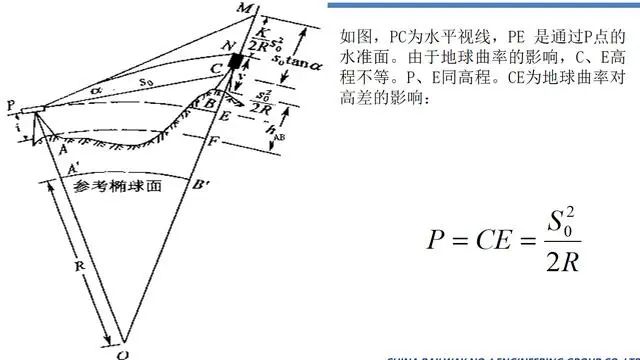
1)地球曲率和大气折射的影响
由于大地水准面是曲面,穿过测量点的切线不一定与水平视线平行。因此,测量的高度差和实际的高度差不一定相等。
空气的密度随着位置的海拔高度而变化。海拔越高,密度越稀。当光线穿过从下到上密度变化均匀的大气层时,光线会发生折射,形成一条朝向地面的凹曲线。造成三角高度测量出现偏差。
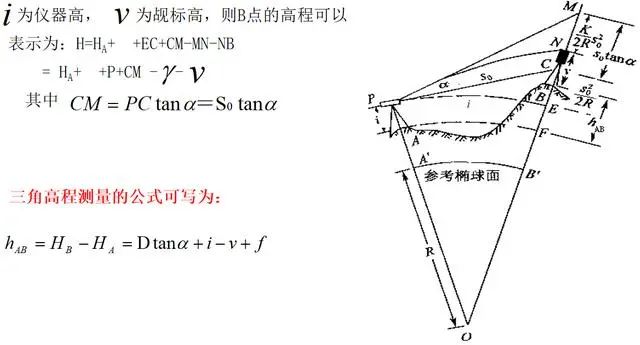
2)通过相反方向观察计算高度差
为了消除或减弱地球曲率和大气折射的影响,三角高程测量一般应沿相反方向进行,又称正向观测和反向观测。对于三角高程测量,获得的高差不应大于0.4D(米),其中D为水平距离,单位为km。如果满足要求,则取两次身高差的平均值作为最终身高差。
(3).三角高程测量的主要误差来源及缓解措施
由公式可知,观测边长D、垂直角、仪器高i、目标高程v的测量误差以及大气垂直折射率K的测量误差都会给三角高程测量结果带来误差。
(1)边长误差
边长误差取决于距离测量方法。采用普通视距法测距的精度仅为1/300;使用电磁波测距仪测量距离的精度非常高,边长误差一般为几万分之一到几十万分之一。边长误差对三角形高程的影响与顶角的大小有关。垂直角度越大,影响越大。
(2)大气垂直折射率误差
大气垂直折射误差主要表现为折射率K值的测量误差。
(3)测量仪器高度和目标标高的误差
仪器高度与目标高程的测量误差有多大,对高差的影响就有多大。因此,应仔细测量仪器高度和目标标高。
5. 平面控制测量

(一)一般规定
平面控制网络的建立可以采用卫星定位测量、有线测量、三角网测量等方法。
平面控制网络层次划分如下:
卫星定位测量控制网分为第二、三、四级和一、二级;
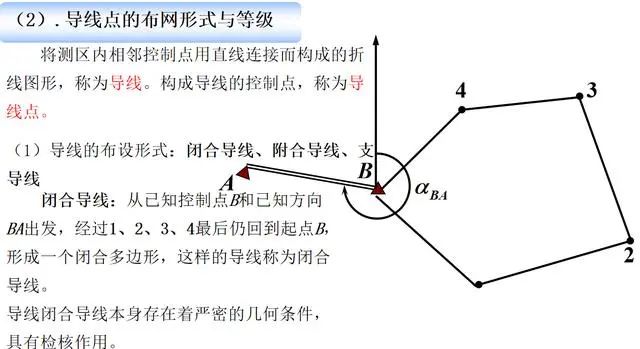
导体和导体网络排名第三、第四和第一、第二、第三;
三角网有第二、第三、第四等以及第一、第二层。
下面主要介绍一级导体平面控制测量
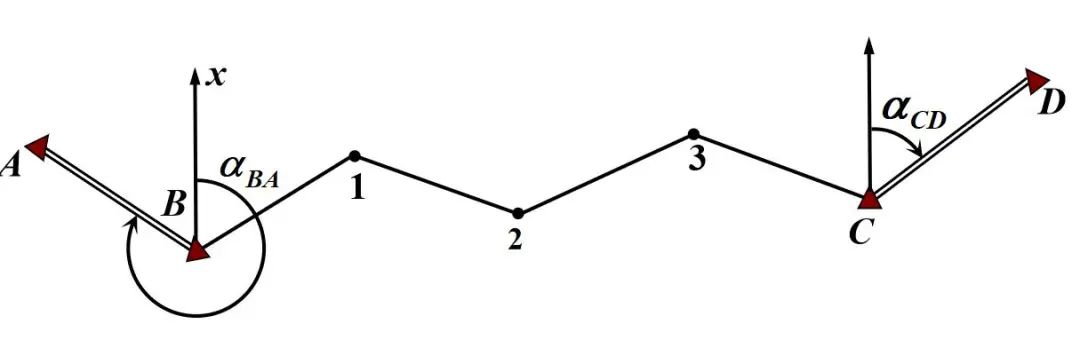
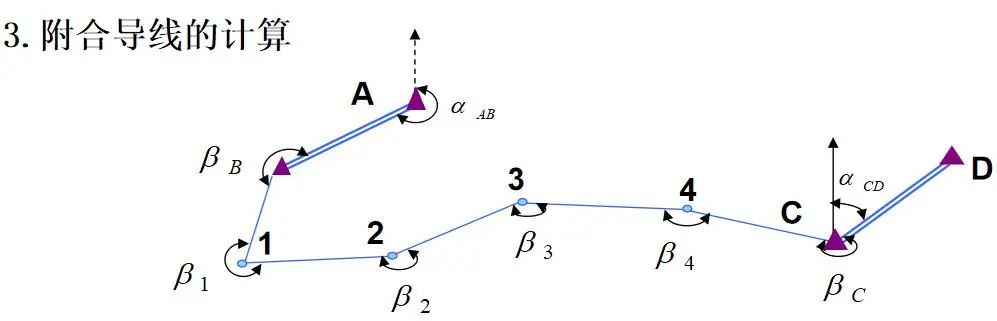
附着线:从已知控制点B和已知方向BA出发开yun体育app官网网页登录入口,经过点1、2、3,最后附着到另一个已知点C和已知方向CD。这样的线称为附线。 。
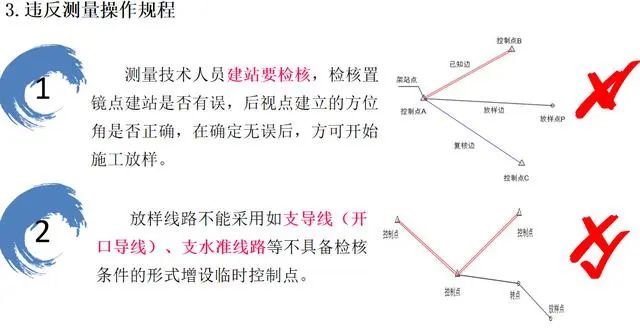
分支导体:从已知点B和已知方向BA出发,不附着到另一个已知点也不返回到原来起点的导体称为分支导体。
施工控制网特点
1)控制范围小,控制点密度大,精度要求高。 2)施工控制网络使用频繁。
3)施工干扰大。 4)施工控制网采用施工坐标系。

(4)。电线的现场测量
1.勘察选址并设立标志
(一)选点要求:
⑴ 相邻点之间能见度好kaiyun.ccm,地形平坦,便于测量角度和距离;
⑵点位应选择在硬土之外,以方便仪器的存放和安装;
⑶视场角宽,便于测量破损部位;
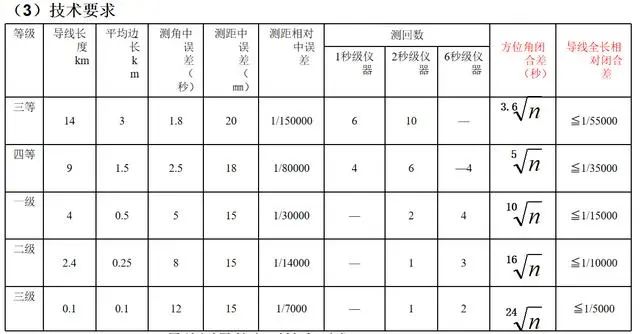
⑷导体每边的长度应近似相等,且不能大于0.7倍。平均边长见表,还需全长;
⑸ 电线密度要足够,分布均匀,以便于控制整个区域。
(2) 建立标志:
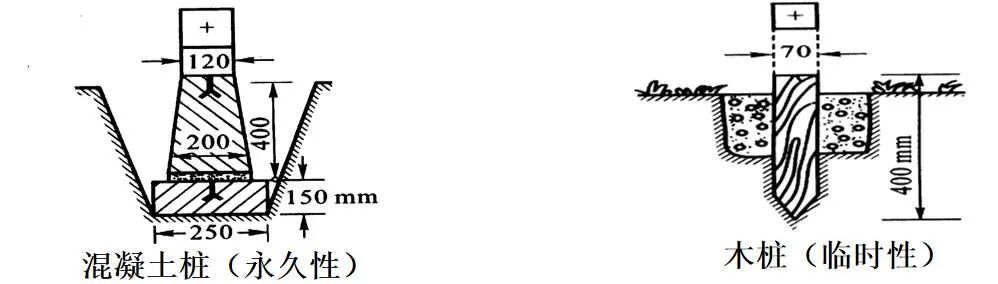
① 临时标记导体点位置选定后,在每个点处打一个木桩,并在桩顶钉一个小钉子作为该点的标记。
②永久标志:需要长期保存的导体点应埋设混凝土桩,并在桩顶埋设带有“+”字样的金属标志作为永久标志。
③线点应统一编号。为了便于查找,应测量导体点与附近明显特征的距离,画出草图,并注明尺寸。该图称为“点标记”。
2、导体转角的测量
一般采用J6经纬仪圆法测量,也可采用定向法测量由两个或多个方向组成的角度。
线材的转弯角度分为左角和右角。
使用高级控制点进行测试时,需要进行连接测量。
(5).线材测量的内部计算
计算步骤:
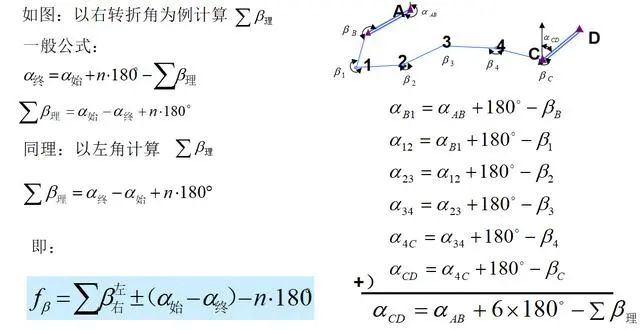
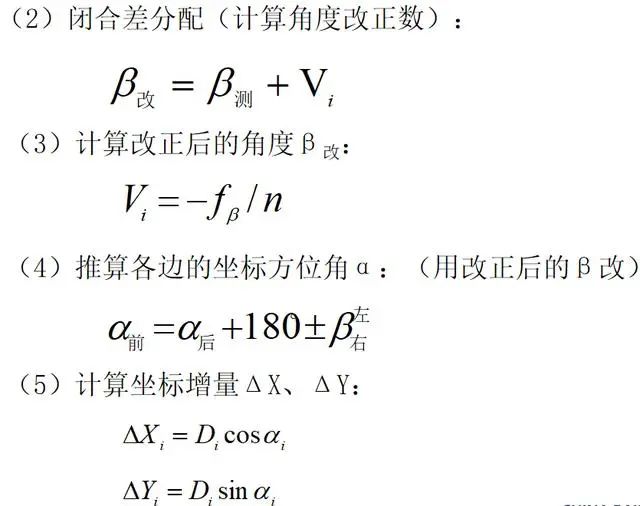
1)计算闭角误差fβ并调整;
2)计算各边的坐标方位角;
3)计算各边的坐标增量X和Y:
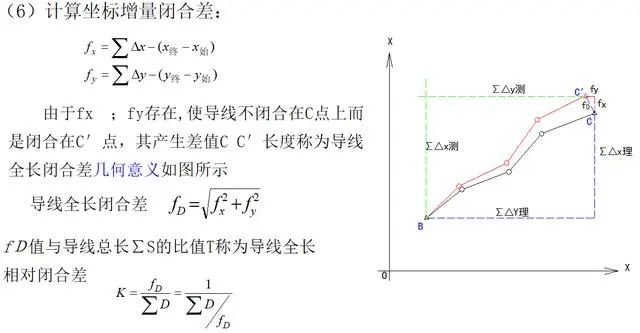
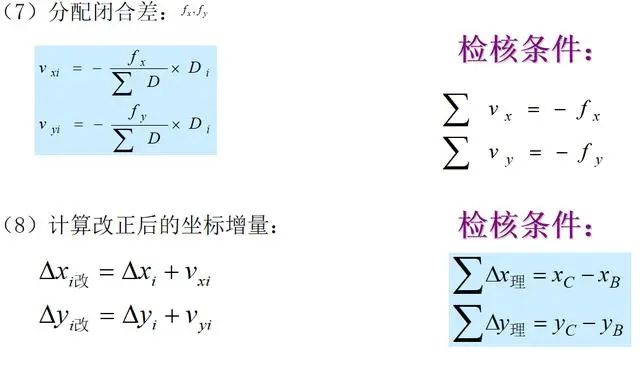
4) 计算纵坐标和横坐标的增量闭合误差fX、fY,整个导体长度的闭合误差fD,以及相对误差K,并进行增量闭合误差调整。
全部:
5)计算各线点的坐标Xi、Yi。
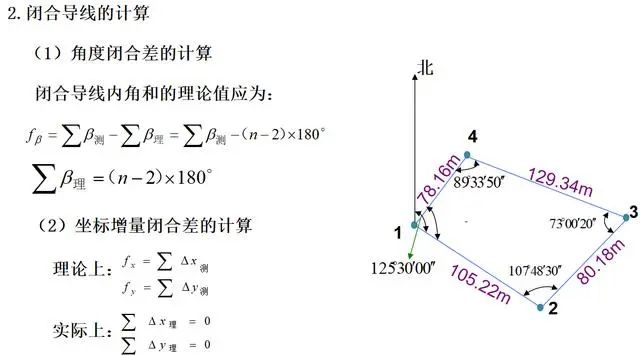
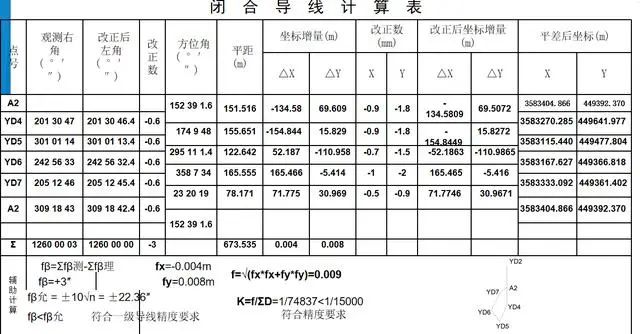
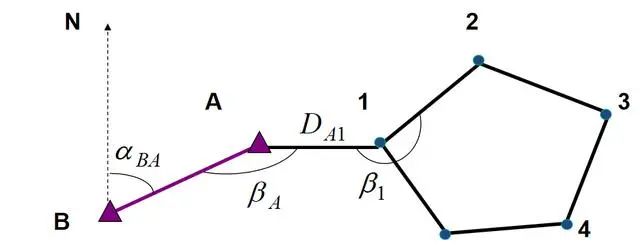
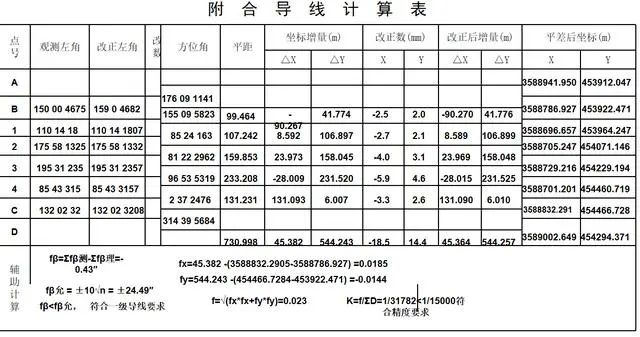
如图所示,A、B、C、D为已知点云开·全站体育app登录,起始边和结束边的方位角已知。现场观察数据包括线边距离和每个转弯角度。
(1) 计算闭角误差:
6、房屋施工过程测量
向健此前发表过一篇关于住房建设计量的文章。
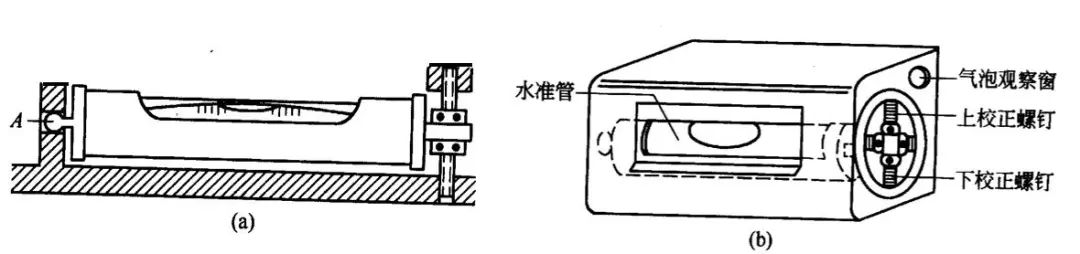
7. 水平检查和校准

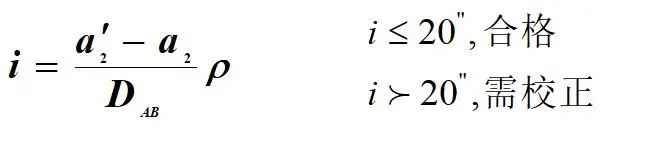
根据上述b2和高差hAB,计算出A点尺上视线水平仪的读数为:
如果a2'等于a2,则表示两轴平行。否则,存在角度i,其角度值为:
(2)修正方法
转动稍微倾斜的螺钉,使十字准线的中间线与标尺上的 A 点对齐,应读取读数 a2'。此时,准直轴处于水平位置,水准管气泡不居中。
用校正针先松开水平管一端的左右校正螺丝,然后转动上下校正螺丝使偏离的气泡重新居中,最后拧紧校正螺丝。
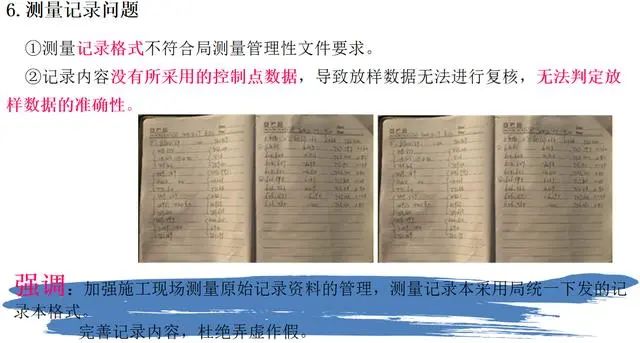
8. 测量案例分析
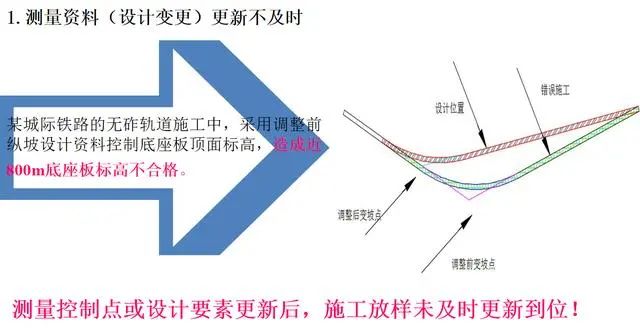
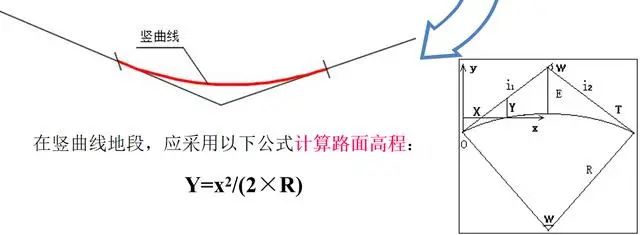
2. 不考虑垂直曲线设置
这些线在设计的坡度变化区域中使用曲线连接。但部分技术人员在计算道路标高时没有考虑竖向曲线的存在,导致结构顶面标高存在误差。